1.说明视觉运动下是否需要运动对齐;以及滑动窗口优化。如果需要滑动窗口优化,呢么是否需要构建优化问题,进行预积分误差和重投影误差的分析
如果需要分析,可否进行仿真下与传统vins fusion相比较,如图与vins mono的对比: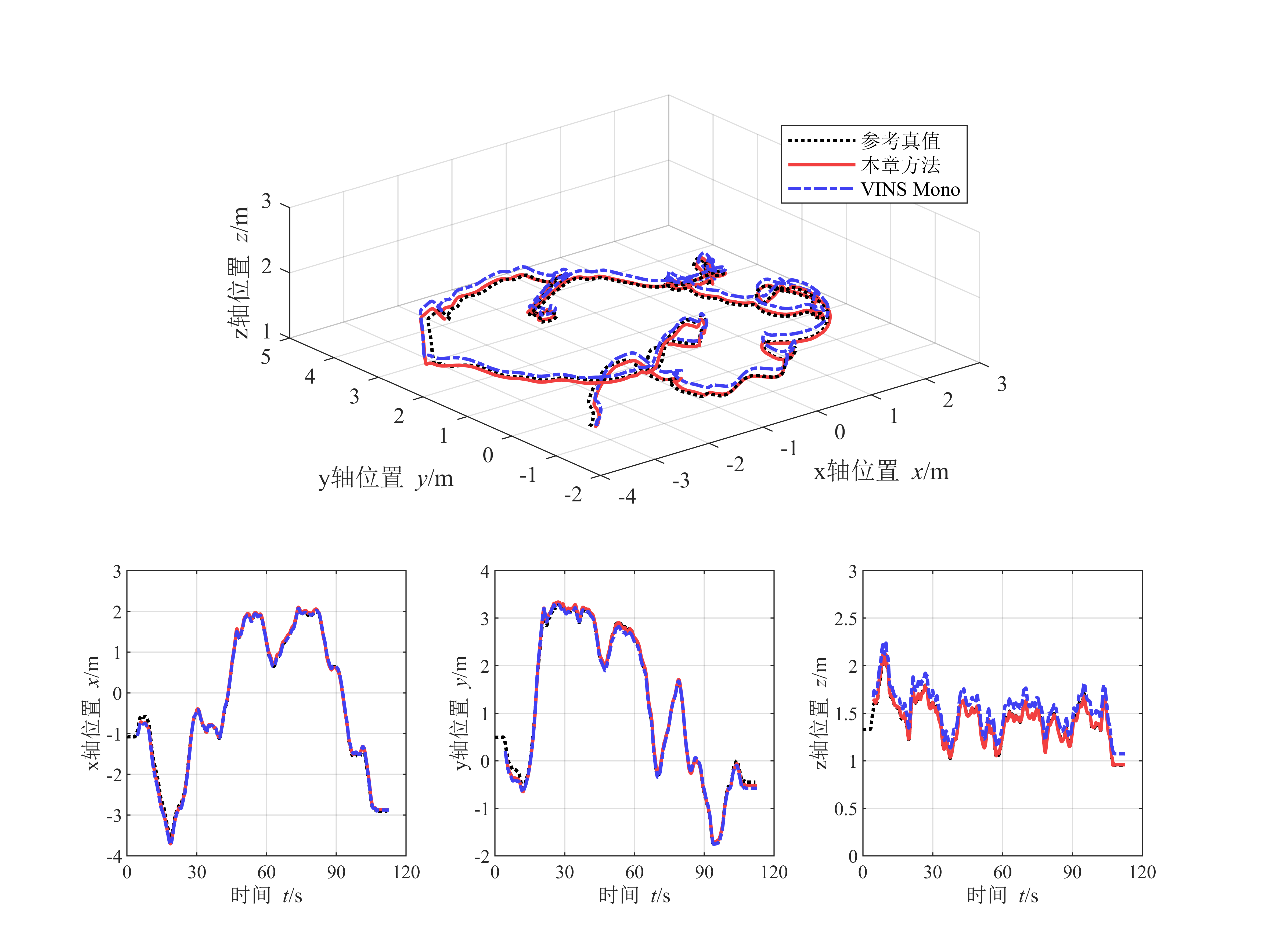
2.可否进行避障问题的问题描述和优化构建,可以在ego planner上进行修改,但能否说明
A)如何构建地图
B)路径优化后的结果
C)仿真下与几个避障算法的对比
最后应该出的是规划出的路径,用控制算法跟踪即可
本文著作权归作者 [ zealoner ] 享有,未经作者书面授权,禁止转载,封面图片来源于 [ 互联网 ] ,本文仅供个人学习、研究和欣赏使用。如有异议,请联系博主及时处理。